Arquitetura do Sistema
Os usuários compartilham o controle do Tele-Ator a partir de seus browsers da Internet. A Comunicação é coordenada com o Servidor "Tele-Actor Server" situado em uma conexão bandalarga (T3). O servidor conecta-se através de um soquete à Estação Base Local no site remoto. A Estação Base Local e o diretor (humano) local comunicam-se com o Tele-Ator através de uma rede wireless. Enquanto o Tele-Ator se move através do ambiente, as imagens de vídeo são capturadas na Estação Base Local e enviadas de volta ao servidor do Tele-Ator para a distribuição como imagens do jpg aos eleitores remotos. As respostas do eleitor são coletadas no servidor do Tele-Ator, indicado para todos os eleitores ativos e para o diretor local, os resultados da eleição ao Tele-Ator através de um canal de audio wireless.
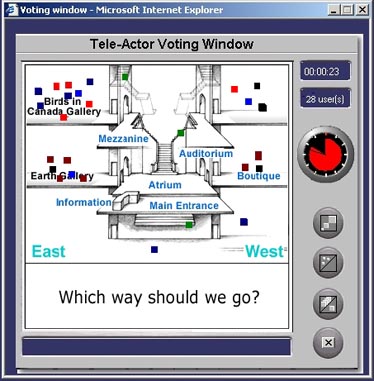
Spatial Dynamic Voting Interface |SDV|
A Interface Spatial Dynamic
Voting Interface [Interface para Eleição Espacial Dinâmica]
facilita a interação e a colaboração entre usuários
remotos. A interface SDV difere da votação de escolhidas múltipla
porque reserva entradas contínuas espacialmente e temporariamente.
Para facilitar o treinamento do usuário e testar o assíncrono,
o sistema do Tele-Ator está disponível em dois modos. No modo
Off-line, todas as imagens da eleição são de uma biblioteca
gravada. No modo On-line, as imagens da eleição são transmitidas
do vídeo capturado ao vivo pelo Tele-Ator. As modalidades Off-line
e On-line da interface SDV têm o potencial para a educação
colaborativa, testando e treinando.
Equipe de design:
Diretor do Projeto: Concept Design Ken Goldberg
Design do Software e Implementação: Dezhen Song
Cenário, Câmera de trabalho, Rede Wireless: Anthony Levandowski
Tele-Ator, Robô, Clone, Curriculum Humano: Annamarie Ho
Cenário, Robô, Clone, Curriculum Humano: Mark Mckelvin
Html: Mikin Faldu
Coordenação de Áudio: Matthieu Metz
Agradecimentos Especiais: Paul Wright, Michelle McLelland, David Pescovitz
ALPHA Lab, UC Berkeley | Ken Goldberg and Dezhen Song et al.
O laboratório Alfa Lab da Universidade da Califórnia Berkeley é um centro de pesquisa em automação e robótica. O foco preliminar é a eficiência geométrica em algorítimos que vão permitir alimentar, fixar e agarrar. A pesquisa na fabricação autômata é necessária para fazer com que a precisão aumente, gerando uma evolução rápida dos produtos no futuro. As edições chaves estão reduzindo tempo e custos de ajustes e aumentando a precisão e a confiabilidade. O objetivo geral da pesquisa é estabelecer uma base da ciência para o conjunto automatizado analisando seus componentes básicos.Além disso, estão estudando os sistemas baseados em rede que permitem que grupos des usuários "explorem" ambientes remotos.
REFERÊNCIAS
Donati, L. A. P. O computador como veste-interface: (re)configurando os espaços de atuação. Campinas, SP: Insituto de Artes, UNICAMP, 2005.
Goldberg, K., Song, D.,
Khor, Y., Pescovitz, D., Levandowski, A., Himmelstein, J., Shih, J., Ho, A.,
Paulos, E., Donath, J. Collaborative Online Teleoperation with Spatial Dynamic
Voting and a Human "Tele-Actor". IEEE International Conference
on Robotics and Automation, May 2002. Disponível em: <http://www.ieor.berkeley.edu/~goldberg/pubs/teleactor-icra02.pdf>.
Acesso em: 20 de março de 2005.
Goldberg, K., Siegwart R. Beyond Webcams: An introduction to online robots. Massachusetts: MIT Press, 2001.
Kac, Eduardo. The Telepresence Garment. YLEM, Vol. 17, N. 9 (Sept/Oct 1997), p. 10. Disponível em <http://www.ekac.org/TelepGarm.html>. Acesso em 20 de março de 2005.
Robots: It's an Art Thing. Wired News, Nov. 12, 2001. Disponível em: <http://www.wired.com/news/gizmos/0,1452,48253,00.html>. Acesso em 24 de abril de 2005.
Song, D., Hu, Q., Qin, N., Goldberg, K. Automating Inspection and Documentation of Remote Building Construction using a Robotic Camera, IEEE International Conference on Automation Science and Engineering (CASE) 2005 , August 1 & 2, 2005, Edmonton, Canadá. Disponível em: <http://www.ieor.berkeley.edu/~goldberg/pubs/dez-construction-pano-iros05-v10.pdf> . Acesso em 20 de março de 2005.
The ALPHA Laboratory. Disponível em: <http://ford.ieor.berkeley.edu/welcome.htm>. Acesso em 21 de março de 2005.
Your wish is my command. New Scientist magazine, vol 172 issue 2322, 22/12/2001, page 62. Disponível em: <http://www.ieor.berkeley.edu/~goldberg/tc/newscientist.html>. Acesso em 24 de março de 2005.

TELE-ACTOR [versão 1_2000 | versão 9_2002]
ALPHA Lab, University of California, Berkeley | Ken Goldberg and Dezhen Song et al.[Estados Unidos]