editorial
editorial
entrevista
interview
artigos submetidos
submitted papers
tapete
carpet
artigo nomads
nomads paper
projeto
project
expediente
credits
próxima v!rus
next v!rus
issn 2175-974x | ano 2015 year

Automatizando o projeto de alvenaria racionalizada
Levi Teixeira Pinheiro é Arquiteto e Urbanista, professor titular do Instituto Federal de Educação, Ciência e Tecnologia do Ceará, Campus Cratéus. Pesquisador no Programa de Pós-graduação de Estruturas e Construção Civil da Universidade Federal do Ceará, onde desenvolve pesquisas em automação do projeto de alvenaria a partir do método building object behavior.
Alexandre Araújo Bertinio é Doutor em Engenharia Civil, professor adjunto do Departamento de Engenharia Estrutural e Construção Civil na Universidade Federal do Ceará. Tem experiência em sistema construtivo, alvenaria estrutural, e desempenho de edificações.
Daniel Ribeiro Cardoso é Arquiteto e Doutor em Comunicação e Semiótica, professor e pesquisador do Departamento de Arquitetura e Urbanismo da Universidade Federal do Ceará. Desenvolve pesquisas em processos contemporâneos de projeto no Design, Arquitetura e Urbanismo, e Modelagem da Informação na Construção (BIM).
Como citar esse texto: PINHEIRO, L.T.; CARDOSO, D.R.; BERTINIO, A.A. Automatizando o projeto de alvenaria racionalizada. V!RUS, São Carlos, n. 11, 2015. [online] Disponível em: <http://www.nomads.usp.br/virus/virus11/?sec=4&item=7&lang=pt>. Acesso em: 13 Jul. 2025.
Resumo
A presente pesquisa tem por objetivo desenvolver um diagrama que sirva como base para automação de projeto de alvenaria racionalizada em qualquer plataforma BIM, visando desenvolver processos de maior eficiência computacional. A investigação adotou o método building object behavior (BOB), desenvolvido pelo grupo de pesquisa formado por Chang Lee, Rafael Sacks e Charles Eastman no período de 2001 a 2004, em universidades dos Estados Unidos e Israel, em consórcio com empresas norte-americanas de concreto armado. O método se enquadra na estratégia de pesquisa design science. O processo de desenvolvimento do trabalho se deu em quatro etapas: fase de elucidação, fase de design, fase de validação e implementação. Ao longo da pesquisa verificou-se a existência de duas possibilidades de diagramas: a primeira proposta por nós e a segunda proposta por Monteiro (2011). Desenvolvemos as duas possibilidades, e a nossa demonstrou melhor eficiência computacional. Assim, ao fim do trabalho, conseguimos gerar os diagramas previstos e propor um diagrama que apresenta melhor eficiência computacional quando comparada a trabalhos anteriores.
Palavras-chave: Parametrização, V!11, BIM, projeto de alvenaria, automação do design.
1. Introdução
O presente trabalho é fruto de uma dissertação de mestrado na Universidade de Federal do Ceará (UFC) em fase de desenvolvimento. A mesma também está inserida no projeto de pesquisa “Desenvolvimento de um Sistema Integrador (software) para Projeto e Execução de Sistemas Construtivos em Alvenaria Coordenada Modularmente” (SISMOD). O projeto é realizado em rede com outras universidades brasileiras, incluindo a Universidade Federal de Alagoas (UFAL) e a Universidade Federal de Santa Catarina (UFSC) e financiado pela Finep.
A construção civil brasileira, por ser um processo construtivo ainda muito artesanal, apresenta graves problemas no método e na forma de produção, além de possuir falha no fluxo de informações (ADDOR et al., 2010). Dentre os caminhos para aperfeiçoar o processo construtivo, tem-se a industrialização e a racionalização. No caso da coordenação modular, o PPVVA (Projeto para Produção de Vedação Verticais em Alvenaria) apresenta algumas ferramentas possíveis para estas finalidades (GREVEN, 2007; MONTEIRO, 2011). Já a falha no fluxo de informações, pode ser solucionada com a adoção do sistema BIM, Building Information Modelling (MÜLLER, 2010).
Os primeiros impulsos de racionalização da construção civil no Brasil ocorreram na década de 1970 com a produção de diversas normas vinculadas a coordenação modular, em sua maioria aplicada a alvenaria (SILVA, 2003). A racionalização da alvenaria é de suma importância, pois além de ser o sistema construtivo mais difundido no Brasil, faz interfaces com vários subsistemas, como estrutural, hidráulico e elétrico (PEÑA; FRANCO, 2006). Em 1980, tem-se a introdução no mercado brasileiro do PPVVA, que visa otimizar a compatibilização da alvenaria com os diversos subsistemas que interagem com ele, como instalações e estruturas (FERREIRA; SANTOS, 2008). Apesar desses esforços, Sabattini (1989), no final da década de 1980, apontava que o desempenho da construção civil ainda se apresentava muito ruim em termos de produtividade e desperdício de materiais. No inicio dos anos 2000, observa-se um maior investimento das construtoras em projetos de alvenaria de vedação racionalizada, em busca da redução de custos para construção.
O conceito de BIM existe desde a década de 1960, porém, devido a ausência de computadores eficientes, o mesmo só se tornou disponível no mercado em meados dos anos 1990 (AYRES, 2009). A plataforma BIM tem como base as tecnologias de parametrização que por meio de objetos paramétricos, isto é, objetos com rica semântica, permitem o gerenciamento e ordenamento de dados aplicados às fases de ciclo de vida de um edifício (SUCCAR, 2010). A partir dessas ferramentas o sistema permite com facilidade identificar a incompatibilidades de projetos, extrair quantitativos automáticos e gerar instanciações do modelo 2D e 3D (ARAYICI et al., 2011). Porém, os softwares BIM, em geral, não atendem as necessidades específicas de cada projetista, logo, a maioria das plataformas permite a sua customização (SACKS et al., 2004). Assim, em nível internacional e nacional, verifica-se a produção de trabalhos de customização de plataformas BIM para automação de design.
Em nível internacional, nota-se grande produção de pesquisas geradas a partir do convênio entre empresas norte americanas de concreto armado e as universidades: Georgia Institute, norte americana, e Israel Institute of Technology, israelita. A parceria denominada “Design and Engineering Software Platform” (PCSC), desenvolvida no período de 2001 a 2004, gerou métodos de automação do design como building object behavior (BOB), description notation and method e o Georgia Tech Process to Product Modeling (GTPPM) (LEE et al., 2005).
O método BOB consiste em um tipo de escrita abreviada para descrever o comportamento de objetos paramétricos e sua relação com outros objetos; já o GTTPPM é um método para traduzir para uma linguagem computacional o comportamento deste objetos. Dentre os pesquisadores envolvidos, destacam-se Rafael Sacks, Charles Eastman e Chang Lee, os dois primeiros são responsáveis pelo desenvolvimento do livro BIM Hand Book, publicado em 2005, documento que compila o estado da arte do BIM e apresenta-se como um guia para sua implementação (EASTMAN et al., 2008). Podem também ser citados trabalhos de Cavieres et al (2009), pesquisador do Georgia Institute, que aplicou o método BOB na automação de projetos de alvenaria estrutural.
Em nível nacional, temos destaque para trabalhos de customização de softwares BIM, porém poucos se destacam na área de automação de design, por exemplo: Ayres (2009) e Monteiro (2011) (CHECUCCI et a.l, 2011), e Romcy (2012). Desenvolvendo trabalhos de forma independente e em universidades distintas, que abordam o tema automação de sistemas construtivos modulares, tendo como base a gramática da forma e modelagem paramétrica, sem utilizar ou fazer referência ao método BOB.
Ao observamos trabalhos já desenvolvidos no Brasil, vemos algumas funcionalidades de automação do projeto de alvenaria que podem ser otimizadas pelo método BOB. Logo, a presente pesquisa tem por objetivo desenvolver um diagrama que sirva como base para automação de projeto de alvenaria racionalizada em qualquer plataforma BIM, visando processos de maior eficiência computacional. O foco da automação é gerar paginação automática de paredes com esquadrias.
2. Revisão Bibliográfica
A automação do design aplicado a plataformas BIM pode ser desenvolvida por vários métodos tendo como base a modelagem paramétrica. Nos trabalhos de Lee (2005) e Cavieres (2009) temos a automação de peças de um sistema de concreto armado utilizando-se do método BOB e a modelagem paramétrica. Já os trabalhos de Romcy (2012) e Monteiro (2011) geram automação de alvenarias racionalizadas a partir da gramática da forma e a modelagem paramétrica.
A gramática da forma surgiu como um sistema de geração de formas para a pintura e a escultura, por meio de regras de composição, e se enquadra na área do conhecimento denominada design computing ou design computacional. O termo computing não quer dizer necessariamente aplicação direta em aplicativos computacionais, mas sim a qualquer tipo de processamento de informações. No entanto, muitos pesquisadores estudam o desenvolvimento de aplicativos para automação da gramática da forma. Atualmente, a mesma vem sendo aplicada em sistema de geração de formas arquitetônicas (CELANI et al., 2007). Dentre os elementos que compõe a gramática da forma, tem-se: o vocabulário de formas, relações espaciais, regras e a forma inicial (MONTEIRO, 2011).
Por outro lado, as tecnologias atuais de modelagem paramétrica permitem uma melhor ligação entre funcionalidade do projeto e da geometria do que a gramática da forma (CAVIERES, 2009). A modelagem paramétrica é uma representação computacional de um objeto virtual construído a partir de atributos. Os atributos podem ser fixos, quando não sofrem modificações ou variáveis, quando são representadas por meio de parâmetros e regras, que permitem ajustes automáticos dos objetos de acordo com o controle do usuário e a mudança de contexto (ANDRADE, RUSCHEL, 2009). Logo, se compreende que os objetos têm de ser modelados, não só pela forma geométrica, mas como unidades de informação que contém relações semânticas específicas no âmbito do seu domínio (SACKS et al., 2003).
A modelagem paramétrica é um método ambíguo e complexo, pois o objeto paramétrico pode ser desenvolvido por vários caminhos, sendo sempre melhor aquele que gera o menor processamento de dados para o sistema computacional. A sua complexidade ocorre, pois, o número e as possibilidades dos parâmetros e restrições crescem exponencialmente quanto mais componentes construtivos são considerados. Além disso, a modelagem paramétrica ainda requer um processo de pensamento algorítmico e matemático (ou programação), mesmo que ele não requeira de fato a utilização de uma linguagem de programação (LEE et al., 2005).
Segundo Sacks et al (2003), há três rotinas possíveis de automação para um objeto paramétrico. O primeiro é o projeto de peças e conexões, compreendida como a geração automática de peças individuais e suas conexões a partir da alimentação de parâmetros. Depois a decomposição edílica em camadas agrupadas, que consiste em um ajuste automático do objeto quando no mesmo é alterado algum parâmetro, como mudança de carga ou de dimensão. Por fim, geração de layout baseado no conhecimento, onde um sistema construtivo, como paginação de alvenaria ou a estrutura de um edifício, podem ser gerados automaticamente após serem alimentados por parâmetros.
O método BOB foi desenvolvido dentro do consórcio de pesquisadores e empresas norte-americanas de concreto armado, surgindo devido à necessidade de alimentar e atualizar constantemente uma biblioteca de objetos paramétricos de peças de concreto armado de forma colaborativa. O mesmo pode ser compreendido como uma escrita abreviada e um protocolo para descrição das definições e comportamento de objetos paramétricos em um formato reutilizável e compartilhável (LEE et al., 2005). As formas de representação do método BOB são os desenhos técnicos como projeções ortogonais em duas dimensões ou perspectivas em três dimensões, porém, as suas representações não carecem de precisão nas fases iniciais. Apenas as relações e comportamento entre os componentes do sistema que são importantes de serem capturadas e comunicadas claramente. A precisão geométrica será determinada durante a modelagem definitiva do objeto. Os comportamentos considerados são os quatro tipos primitivos: fixar, rotacionar, traslar e remodelar. Já as relações especiais com outros componentes podem ser de alinhamento, igual espaçamento, horizontal e restrição normal (CAVIERES, 2009).
3. Método
A presente pesquisa utiliza o método de notação e descrição BOB desenvolvido por Lee et al (2005), que se enquadra na estratégia de pesquisa design science que, diferente da ciência convencional, não se descobre nada novo, e sim, se produz algo novo. No caso, um artefato que visa resolver problemas enfrentados no mundo real, cuja sua contribuição teórica ocorre a partir de sua aplicação. Dentre artefatos que podem ser produzidos tem-se: modelos, diagramas, planos, estruturas organizacionais, produtos comerciais e design de sistemas de informação (LUKKA, 2003).
O método original é desenvolvido em quatro etapas, porém, devido à ausência de um programador para dar suporte ao trabalho, faremos pequenas alterações nas duas etapas finais. A primeira será a fase de elucidação, que consiste na definição dos sistemas construtivos e da proposta de automação. A segunda é a fase de design, onde são identificados os parâmetros, restrições e padrões mínimos do sistema. Na terceira, que seria a fase de implementação, onde deveríamos implantar os padrões dentro de um plug-in, será a fase de validação. Nesta iremos validar o comportamento dos padrões submetendo-os em situações distintas na forma de script dentro da plataforma Archicad 18. A última fase, seria a fase de validação, porém será a fase implementação, onde serão desenvolvidos diagramas de atividades na linguagem UML, segundo Booch et al (2000) os mesmos não precisam ser desenvolvidos em linguagem de programação. Assim, os diagramas desenvolvidos servirão com base para geração de plug-in aplicável em qualquer plataforma BIM.
4. Resultados e Discussão
4.1. Fase de elucidação
O objeto paramétrico escolhido para ser automatizado foi o sistema construtivo de alvenaria racionalizada de amarração ½, que possui como componentes principais os blocos de tijolos (cerâmicos ou de concreto) e as juntas de argamassa, além de componentes complementares, como blocos canaletas em “U” que servem como vergas e contravergas, isto é, componentes estruturais dos vãos. A função escolhida foi paginação completa de uma alvenaria isolada com vãos (ver figura 01), que se enquadra no nível de automação “geração de layout baseado no conhecimento”.
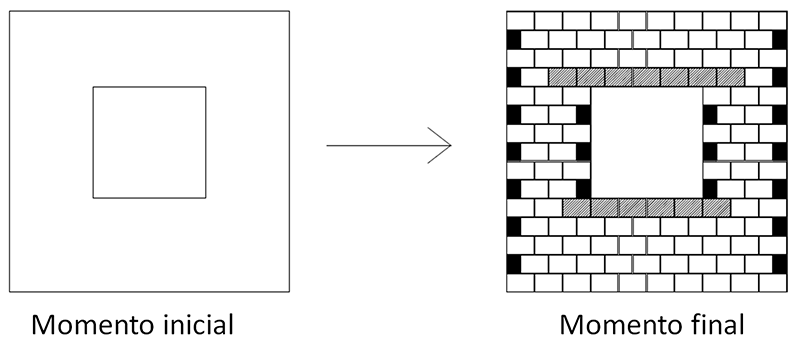
Figura 1. Comportamento do objeto paramétrico. Fonte: Autor.
4.2. Fase de Design
Durante esta fase foram analisadas as restrições, parâmetros e identificados os padrões de comportamento. O método se partiu do conceito de “modelagem de cima para baixo” SACKS (2003), onde se observou inicialmente o comportamento das parede sem detalhes, avaliando os seus comportamentos geométricos e restrições em relação a outros componentes, como vergas, contravergas e amarração entre blocos.
4.2.1. Restrições e parâmetros
O parâmetro comum a todos os componentes do sistema é o fato de que todos devem ser múltiplos do módulo M, que terá o valor de 15cm, comum ao conjunto de componentes comerciais cerâmicos ou de concreto. Além dessa convergência de parâmetros, há algumas particularidades, no caso, os vãos só podem estar inseridos dentro das paredes e ambos os objetos só podem sofrer qualquer remodelação dimensional em relação a altura e comprimento, pois a espessura é fixa (ver figura 02). Já as vergas contravergas, que funcionam como componentes estruturais dos vãos de esquadrias, devem se localizar sobre e abaixo dos mesmos, respectivamente. Já em termos dos componentes estruturais que possuem espessura e altura fixa e de comprimento deve sobrar no mínimo 30cm a mais que o vão para cada lado (ver figura 03). Um ponto que deve ser observado são tipos de vãos existentes, como as portas que só possuem vergas e as janelas que possuem os dois componentes estruturais.
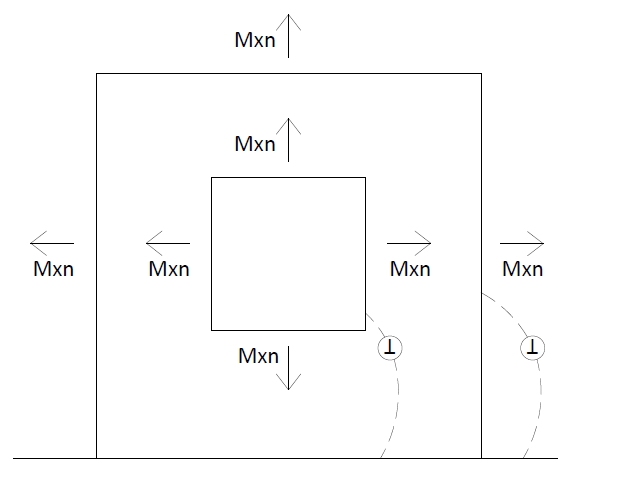
Figura 2. Vãos: Parâmetros e restrições. Fonte: Autor.
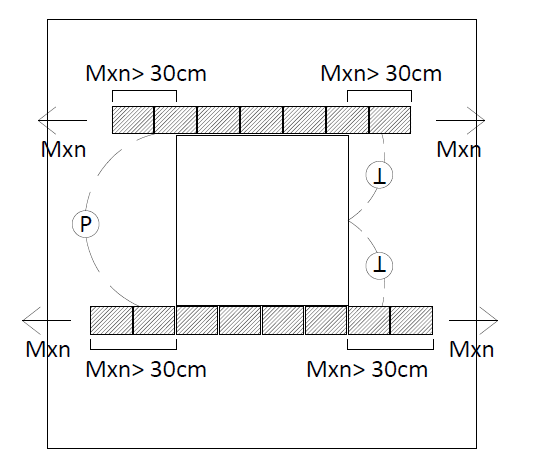
Figura 3. Vergas e contra vergas: Parâmetros e restrições. Fonte: Autor.
Além dos vãos, que são componentes opcionais, as paredes são formadas principalmente por blocos e juntas de argamassa. O comprimento dos blocos devem se posicionar paralelos ao chão e os blocos adjacentes na mesma fiada devem ser encaixados pela espessura. Já os blocos da fiada superior devem ser encaixados sobre a metade o inferior evitando as juntas coincidentes (ver figura 04). Entre um bloco e outro na parte lateral e superior tem-se juntas de argamassa de 1cm (ver figura 05).
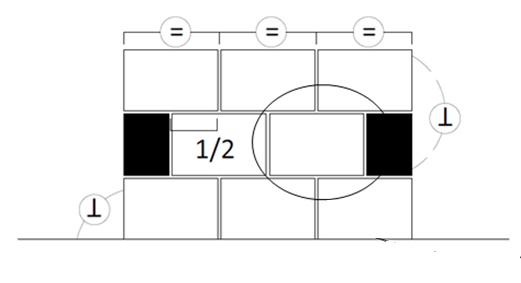
Figura 4. Blocos: Parâmetros e restrições. Fonte: Autor.
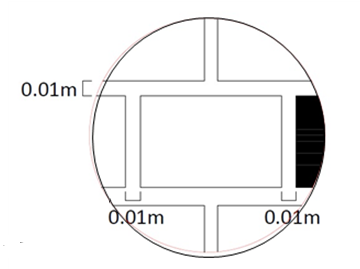
Figura 5. Detalhes de juntas: Parâmetros e restrições. Fonte: Autor.
Os blocos que compõem as alvenarias possuem dimensões fixas, múltiplas do módulo M, sendo suas espessuras e alturas iguais, mas os comprimentos variáveis. Logo, temos três tipos de blocos principais denominados de 2M e os blocos de amarração 1M e de 3M, que possuem as seguintes dimensões modulares em termos de comprimento, espessura, altura: 15x15x20cm, 30x15x20cm e 45 x15x20cm e os tamanhos reais, devido à presença de juntas horizontais e verticais são 14x14x19cm, 29x14x19cm e 44x14x19cm. Já os do tipo canaleta possuem dimensões 1M e 2M e são utilizados como vergas e contraverga (ver figura 06 e 07).
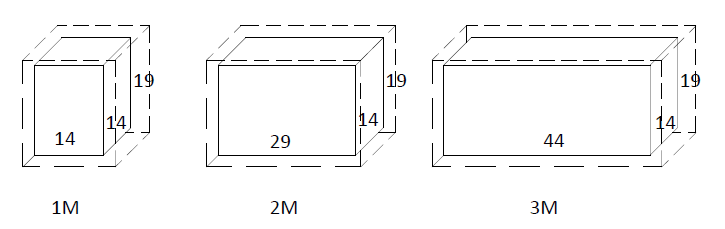
Figura 6. Blocos principais: Parâmetros e restrições. Fonte: Autor.
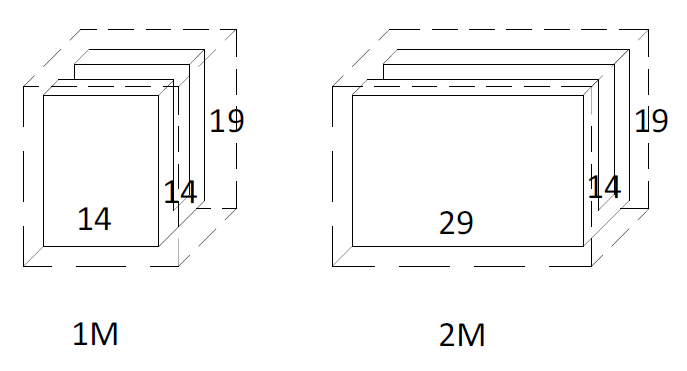
Figura 7. Blocos principais: Parâmetros e restrições. Fonte: Autor.
4.1.1. Identificação de padrões mínimos
Os padrões de comportamento do sistema construtivo são identificados por meio da associação das restrições apresentadas com as dimensões modulares dos componentes do sistema construtivo e a locação dos mesmos. Após a análise da produção de pesquisas anteriores, observou-se que existem duas possibilidades, isto é, dois conjuntos de padrões para gerar a paginação automática de paredes com esquadrias. A primeira proposta por Monteiro (2011) e outra proposta por esta pesquisa. Como foram escolhidos dois caminhos distintos para automação, temos algumas variações de padrões de acordo com cada um dos caminhos escolhidos.
Ao observamos o comportamento de uma parede paginada a partir de suas dimensões pode-se extrair os seguintes padrões R1, quando o comprimento obedece a fórmula a seguir C= MxN + 1M (ver figura 08), e R2, quando o comprimento obedece a seguinte fórmula C=MxN (ver figura 09), já previstos por Romcy (2012).
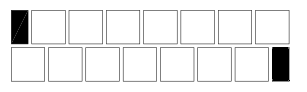
Figura 8. Parede R1. Fonte: Autor.

Figura 9. Parede R2. Fonte: Autor.
Ao observamos as variáveis em interface com um vão de esquadria podemos trabalhá-las como fez Monteiro (2011), separando o preenchimento por áreas. Porém, diferente dos padrões da parede isolada apresentados acima, onde as paredes iniciam somente com R1 aqui podem iniciar e terminar com R1 ou R2, pois a variação da paginação da parede com esquadria depende da localização e do comprimento da parede. Assim, a partir da determinação de áreas, temos as seguintes situações (ver figura 10):
Se a área for A1, as paginações só podem iniciar com R1 e terminar com R1 ou R2;
Se área for A2, A3, A4 e A5, as paginações podem iniciar ou terminar com R1 ou R2;
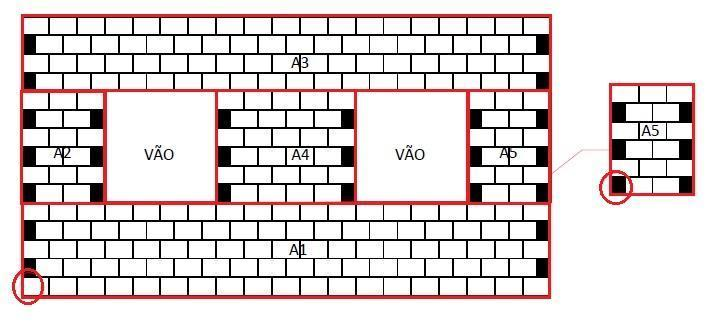
Figura 10. Experimento I. Fonte: Autor, adaptado de Monteiro (2011).
Outro meio possível de se paginar uma parede é preencher a paginação inteira desconsiderando a presença da esquadria, como fosse uma área única do tipo A1 e depois eliminar ou substituir os blocos necessários. Ao partimos dessa premissa temos novas situações, válidas para qualquer tipo de vão:
Padrão AB1: Se existirem blocos inteiramente dentro do vão, todos serão eliminados;
Padrão AB2: se existiram blocos de 2M parcialmente dentro do vão, todos serão substituídos por blocos de 1M;
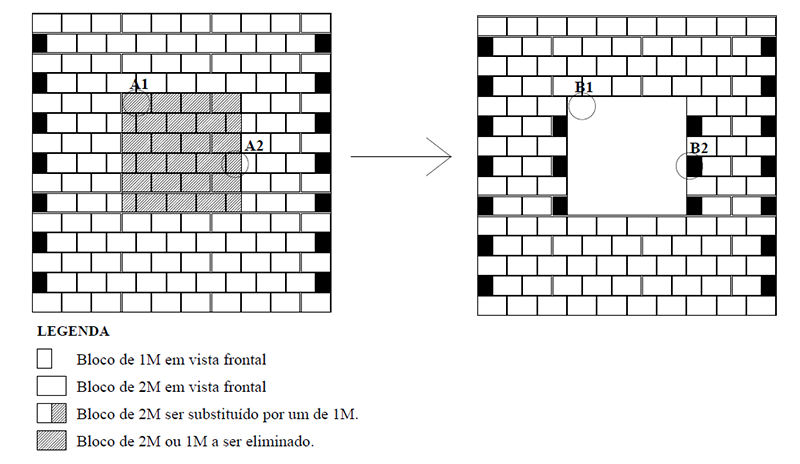
Figura 11. Experimento II. Fonte: Autor.
Já o padrão destinado para as vergas e contravergas é comum para ambos os experimentos. Estas peças estruturais devem se localizar acima e abaixo do vão, e, de acordo com as possibilidades de paginação, podem assumir dois tamanhos distintos (ver figura 12):
Padrão CD1
- A dimensão da verga obedecerá a seguinte fórmula: vão + 30 cm, caso o bloco localizado no final do vão estiver inteiramente acima do mesmo.
- A dimensão da contraverga obedecerá a seguinte fórmula: vão + 30 cm, caso o bloco localizado no final do vão estiver inteiramente a acima do mesmo.
Padrão CD2
- A dimensão da verga obedecerá a seguinte fórmula: vão + 45 cm, caso o bloco localizado no final do vão estiver parcialmente acima do mesmo.
- A dimensão da contraverga obedecerá a seguinte fórmula: vão + 45 cm, caso o bloco localizado no final do vão estiver parcialmente acima do mesmo.
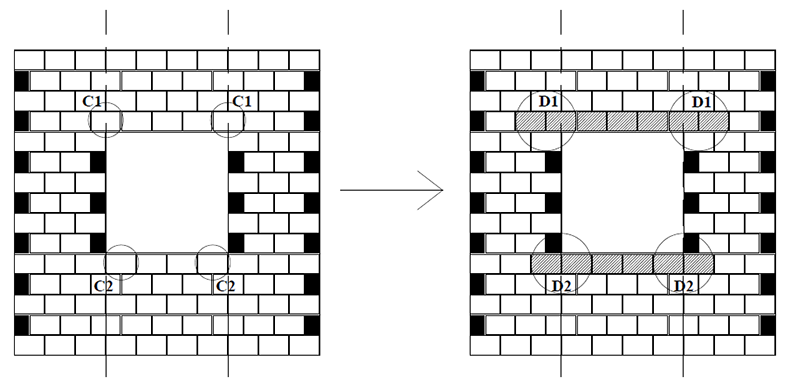
Figura 12. Vergas e contravergas. Fonte: Autor.
4.3. Fase de Validação
Durante esta etapa os padrões foram modelados e submetidos a testes dentro do software Archicad 18 a nível de script, onde foram simuladas diversas situações.
Os modelos desenvolvidos possuem representações tridimensionais e bidimensionais, no caso, optamos somente pelas bidimensionais, pois permitem uma visualização mais objetiva e clara do comportamento dos padrões. Sobre cada padrão apresentado foi realizado dois ou mais testes. O primeiro foi o de reconhecimento do comportamento, os restantes são de validação, aqui iremos considerar que quando o comportamento se repete no segundo teste, o mesmo já é válido, pois a tendência é que o mesmo se repita ao longo do outros testes.
Assim, iremos submeter os dois caminhos de automação em testes similares. O primeiro teste consiste no preenchimento da paginação completa de uma parede com 3mx3m com um vão de esquadria de tamanho modular 1,05mx1,20m e tamanho real 1,06x1,21; localizada de uma forma centralizada sobre si mesma, conspirando a parede sem revestimento. O segundo utilizaremos a mesma parede, porém aumentaremos o valor de um módulo (M), isto é 15cm, para cada lado da janela, e 20cm para cima, o valor da altura do bloco ficando a mesma com o tamanho modular de 1,35x1,40 e tamanho real de 1,36x 1,41. O aumento de um módulo corresponde à variação mínima que pode surgir. Caso surja novos padrões não previstos, serão feitos novos testes ampliando mais 15cm e sempre ajustando o tamanho real com tamanho modular (ver figura 13).
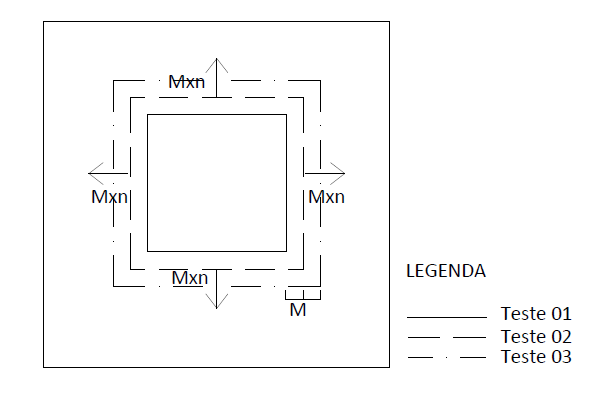
Figura 13. Testes 01, 02 e 03. Fonte: próprio autor.
Após os testes realizados percebeu-se que o método I foi contemplado 100%. Por outro lado, o método II atendeu parcialmente as expectativas, pois ao aplicarmos a regra de substituição de blocos A2 por B2, isto é, bloco de 2M por um de 1M, os localizados à direita do vão foram relocados em posições erradas (ver figura 14). Isto ocorreu pelo fato de que todo objeto paramétrico na, plataforma Archicad, possui um ponto de referência para ser substituído ou inserido. Com intuito de resolver o problema, teríamos que criar dois blocos de 1M com pontos de referências distintos ou movê-los depois de inseridos. A primeira opção foi descartada, pois não foi possível realizá-la no software Archicad 18. Logo, optou-se pelo algoritmo que gere o deslocamento do mesmo após inserido. Assim, se sugeriu a subdivisão dos padrões em C2.1, C2.2. e realizaram novos testes que comprovaram os mesmos.
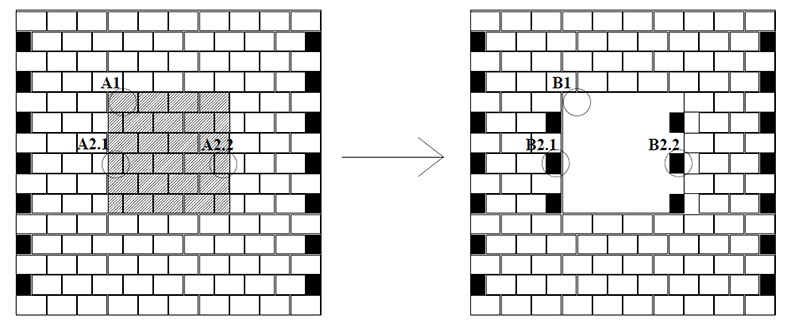
Figura 14. Método II: teste 01. Fonte: próprio autor.
Quanto ao algoritmo correspondente às vergas e contravergas, comum a ambos os experimentos, apresentou um comportamento inesperado, onde dois padrões (CD1 e CD2) geraram um único conjunto de ações (ver figura 15).
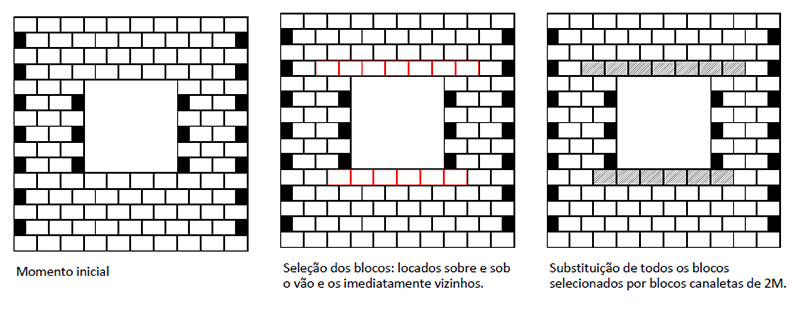
Figura 15. Simulação vergas e contravergas. Fonte: Autor.
Porém, quando as esquadrias são locadas no canto da parede, situação mais comum às portas, temos a presença de blocos de 1M e 2M, que tem que ser selecionados e substituídos de forma individual, gerando assim, um novo padrão.
4.4. Fase de Implantação
Os diagramas de atividades foram desenvolvidos em três etapas. Primeiro extraiu-se as ações presentes em cada método e nos seus respectivos testes. Depois se comparou as ações existentes dentro de cada teste. Por fim, gerou-se um único diagrama para cada método. Assim, quando encontrado ações similares inseriu-se um fluxo de ações contínuo; quando se percebeu divergências de ações utilizou-se um instrumento chamado bifurcação. Em casos específicos, quando após uma bifurcação for necessário unificar o fluxo, utiliza-se uma barra de união (ver figura 16).
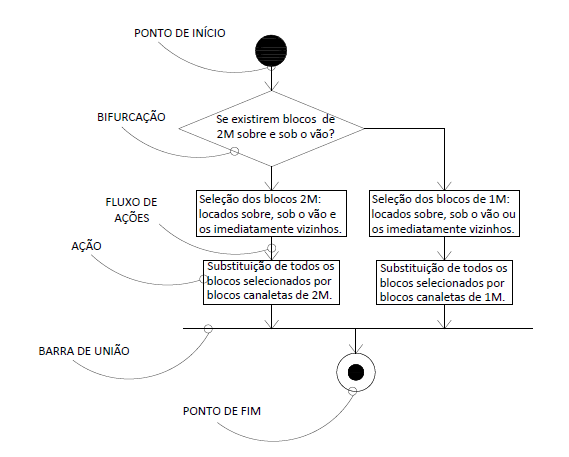
Figura 16. Diagrama vergas e contra vergas. Fonte: Autor.
Após o desenvolvimento de ambos os diagramas percebe-se que o caminho escolhido por nós gera um fluxo de ações bem menor se comparado ao de Monteiro (2011). Porém, o de Monteiro (2011) tem a possibilidade de repetição de um mesmo algoritmo, que dependendo da quantidade de esquadrias sobre a parede pode ser repetido de 04 a 05 vezes, que gera a redução das ações do fluxograma, mas fica sempre dependente de uma biblioteca de algoritmos. E mesmo assim, ainda continua maior que o nosso fluxo (anexo 01 e anexo 02). Quanto às vergas e contravergas, tem-se um único fluxo de ações para dois padrões visuais distintos. Porém, adicionamos mais fluxo devido à possibilidade de substituição de blocos de 1M, que possui o mesmo conjunto de ações mudando somente o tipo de bloco (ver figura 16). Outra vantagem apresentada pelo novo algoritmo produzido é que o mesmo pode ser aplicado em outra situação como, por exemplo, quando já tivermos uma parede paginada e quisermos inserir uma parede sobre a mesma.
5. Conclusões
Durante o experimento reafirmaram-se algumas teorias, como ambiguidade, complexidade e eficiência da modelagem paramétrica, além do suporte científico do design science para as devidas adequações ao método BOB as condições deste trabalho.
Lee et al (2005) considera a modelagem paramétrica como um método ambíguo, pois há várias possibilidades de chegar ao mesmo caminho, sendo o melhor aquele que possui o menor processamento de dados. Com os experimentos realizados podemos verificar o caminho desenvolvido por nós como o melhor caminho, pois possui o menor fluxo de ações. Outros fenômenos observados foram os dois padrões visuais das vergas e contravergas verificados na fase de design, que na fase de implantação foram traduzidos em um único fluxo de ações. Assim se comprova a ambiguidade desse método, além, de demonstrar que nem sempre padrões diferentes geram fluxo de ações diferentes. O método BOB tem se mostrado bem mais eficiente, no sentido da clareza e objetividade durante a identificação e validação dos padrões de comportamento dos componentes do projeto de alvenaria, principalmente se comparado com outros trabalhos nacionais similares que utilizam a modelagem paramétrica e a gramática da forma para desenvolverem os seus próprios métodos.
Aumentando o tamanho dos projetos, o Barclays Arena, um projeto composto por instalações desportivas, com uma grande zona de varejo em Nova Jersey, foi um projecto de escala tão grande que a SHoP Architects não estava acostumada a trabalhar. O principal fato neste caso foi a reutilização de uma série de painéis metálicos, para construir todo o edifício, reduzindo as despesas de material. A otimização do projeto chegou a um nível tão elevado que cada pedaço do prédio tem seu próprio código QR e é possível digitalizá-lo com um aplicativo para iPhone especialmente projetado para isso. Todos os trabalhadores possuiam um destes aparelhos celulares, e depois da colcoação de cada peça, ela era digitalizada. Isso trouxe um controle muito rigoroso do que estava acontecendo na construção, porque este aplicativo era constantemente atualizado com novas informações. Este projeto foi desenhado com CATIA, permitindo a concepção de novos painéis, além de uma maior otimização dos já existentes.
A teoria do design science nos ajudou a sancionar dúvidas a respeito do método BOB no âmbito científico, por exemplo, como validar os experimentos sem a realização da programação e que artefato poderíamos gerar. No caso, o design science se apresenta como um dos meios de validação à submissão do artefato em todos os contextos possíveis, por isso fizemos experimentos a partir de variações de tamanhos modulares. Em termos de artefato, o mesmo pode ser apresentado como um diagrama. Já em termos de contribuições científicas, o trabalho apresenta o desenvolvimento de um novo caminho para paginação de paredes que fazem interface com o vão e a inserção da ferramenta de simulação em script no método BOB.
O incremento da simulação de script ao método BOB ajudou bastante para o desenvolvimento de diagramas mais precisos, devido à ausência de um programador. Porém, recomenda-se em trabalhos futuros, que possuam programadores na equipe, a utilização desta ferramenta, não para todos os padrões, mas sim para os principais. Recomenda-se, também, a aplicação dos diagramas desenvolvidos em uma plataforma BIM por meio de um plug-in.
Agradecimentos
Agradecimentos ao FINEP, Financiadora de Estudos e Projetos.
Referências
ADDOR, M.; CASTANHO, M.; CAMBIAGHI, H.; DELATORRE, J.; NARDELLI, S.; OLIVEIRA, L. Colocando o “i” no BIM. Revista Acadêmica Arquitetura e Urbanismo, São Paulo, n. 4, p. 104-115, 2010.
ANDRADE, M.; RUSCHEL, R. Interoperabilidade entre ArchiCAD e Revit por meio do formato IFC. In: ENCONTRO DE TECNOLOGIA DE INFORMAÇÃO E COMUNICAÇÃO NA CONSTRUÇÃO CIVIL, 4., 2009, Rio de Janeiro. Anais… Rio de Janeiro, 2009.
ARAYICI, Y.; COATES, P.; KOSKELA, L.; KAGIOGLU, M.; USHER, C. Technology adoption in the BIM implementation for lean architectural practice. Automation in Construction, v. 20, n. 2, p. 291-312, 2011.
AYRES, C. Acesso ao modelo integrado do edifício. 2009. Dissertação (Mestrado em Construção Civil) – Universidade Federal do Paraná, Curitiba, 2009.
BOOCH, G.; RUMBAUGH, J.; JACOBSON, I. UML–guia do usuário. Trad. Fábio Freitas da Silva. Rio de Janeiro: Campus, 2000.
CAVIERES, A.; GENTRY, R.; AL-HADDAD, T. Knowledge-based parametric tools for concrete masonry walls: conceptual design and preliminary structural analysis. Automation in Construction, v. 20, n. 6, p. 716–728, Out. 2011.
CELANI, G.; CYPRIANO, D.; GODOI, G.; VAZ, V. A gramática da forma como metodologia de análise e síntese em arquitetura. Conexão: comunicação e cultura, v. 5, n. 10, p. 181-197, 2006.
CHECCUCCI, S.; PEREIRA, A.P.C.; AMORIM, A.L. A difusão das tecnologias BIM por pesquisadores do Brasil. In: TIC, 5., Salvador, 4-5 Ago. 2011. Anais… 2011.
DUEÑAS PEÑA, M.; FRANCO, L. Método para elaboração de projetos para produção de vedações verticais em alvenaria. Gestão & Tecnologia de Projetos, v. 1, n. 1, p. 126-153, Nov. 2006.
EASTMAN, C.; TEICHOLZ, P.; SACKS, R.; LISTON, K. BIM handbook: a guide to building information modeling for owners, managers, designers, engineers and contractors. Hoboken: Wiley, 2008, 490 p.
FERREIRA, R.; SANTOS, E. Uma proposta de uso do CAD 3D em projetos para produção de vedações verticais em edifícios. São Paulo: EPUSP, 2008. 22p. (Boletim Técnico da Escola Politécnica da USP).
GREVEN, H.; BALDAUF, A. Introdução à coordenação modular da construção do Brasil: uma abordagem atualizada. Porto Alegre: ANTAC, 2007. (Coleção Habitare).
LEE, G.; SACKS, R.; EASTMAN, M. Specifying parametric building object behavior (BOB) for a building information modeling system. Automation in Construction, v. 15, n. 6, p. 758-776, Nov. 2005
LUKKA, K. The constructive research approach. In: OJALA, L.; HILMOLA, O-P. (Eds.). Case study research in logistics. Turku: Turku School of Economics and Business Administration, 2003, p. 83-101.
MONTEIRO, A. Projeto para produção de vedações verticais em alvenaria em uma ferramenta CAD-BIM. 2011. 111f. Dissertação (Mestrado em Engenharia) – Universidade Federal de São Paulo, São Paulo, 2011.
MÜLLER, A. Informações para placas cerâmicas de revestimento segundo a abordagem BIM. 2010. 167f. Dissertação (Mestrado em Engenharia de Edificações e Saneamento) – Programa de Pós-graduação em Engenharia Civil pela Universidade Estadual de Londrina, Londrina/PR, 2010.
ROMCY, N. Proposta de tradução dos princípios da coordenação modular em parâmetros aplicáveis ao building information modeling. 2012. 181f. Dissertação (Mestrado em Engenharia Civil) – Universidade Federal do Ceará, Fortaleza, 2012.
SACKS, R.; EASTMAN, M.; LEE, G. Parametric 3D modeling in building construction with examples from precast concrete. Automation in Construction, v. 13, n. 3, p. 291-312, Maio 2003.
SILVA, M. Diretrizes para o projeto de alvenarias de vedação. 2003. 167 p. Dissertação (Mestrado em Engenharia) - Escola Politécnica, Universidade de São Paulo, São Paulo, 2003.
SUCCAR, B. Building information modelling framework: a research and delivery foundation for industry stakeholders. Automation in Construction, v. 18, n. 3, p. 357-375, Maio 2009.
Automating the rationalized masonry design
Levi Teixeira Pinheiro is Architect and Urbanist, professor at the Federal Institute of Education, Science and Technology of Ceará, Campus Crateús, Brazil. Researcher in the Post-graduate Program of Structures and Construction at Federal University of Ceará, Brazil, where he conducts researches on automation of the masonry design through the building object behavior method.
Alexandre Araújo Bertini is a Doctor in Civil Engineering, associate professor of the Department of Structural Engineering and Construction at the Federal University of Ceará, Brazil. It has experience in building system, structural masonry, and performance of buildings.
Daniel Ribeiro Cardoso is Architect and Doctor in Communication and Semiotics professor and researcher at the Department of Architecture and Urbanism at the Federal University of Ceará, Brazil. Conducts research in contemporary processes of design in the Design, Architecture and Urban Planning, Modeling and Information in Construction (BIM).
How to quote this text: Pinheiro, L.T., Cardoso, D.R. and Bertinio, A.A., 2015. Automating the rationalized masonry project. V!RUS, São Carlos, n. 11. [online] Available at: <http://www.nomads.usp.br/virus/virus11/?sec=4&item=7&lang=en>. [Accessed: 13 July 2025].
Abstract
The present research aims to develop a diagram that serves as the basis for the automation of rationalized masonry project at any Building Information Modeling (BIM), with the goal to develop greater computational efficiency processes. The Building Object Behavior method (BOB) was used in the research. This method was developed from 2001 to 2004 by the research group composed by Chang Lee, Rafael Sacks and Charles Eastman at universities in the United States and Israel in a partnership with North American companies of reinforced concrete and it fits as design science research. The research was conducted in four stages: clarification, design, validation and implementation. During the development of the study it was found that there are two possible diagrams: the first one proposed by us and the other proposed by Monteiro in 2011. With both possibilities analyzed, our diagram demonstrated better computational efficiency. At the end of the research we were able to generate the expected diagrams and propose a diagram showing better computational efficiency compared to previous works in the area.
Keywords: Parametrization, V!11, BIM, masonry design, automation design.
1. Introduction
This study is the result of a Master research carried out at the Federal University of Ceará (UFC). The thesis is also included in the research project “Development of an Integrator System (software) for Design and Execution of Building Systems in Masonry Coordinated Modularly”1. The project is developed in partnership with Brazilian universities, including the Federal University of Alagoas (UFAL) and the Federal University of Santa Catarina (UFSC) and it is funded by the Brazilian Innovation Agency (Finep).
The Brazilian construction industry has serious problems in the method and form of production mainly because of its still low tech constructive process, and also by having issues on the information flow (Addor et al., 2010). Among the ways to improve the construction process we have industrialization and rationalization. The Method of Masonry Walls Designing for Production (MWDP) (known by the acronym PPVV in Portuguese) has some potential tools for these purposes (Greven, 2007; Monteiro, 2011). On the other hand, the failure on the information flow can be solved by the use of the Building Information Modelling (BIM) (Müller, 2010).
The first steps to rationalize the civil construction in Brazil occurred in the 1970s with the production of various standards related to modular coordination mostly applied to masonry (Silva, 2003). The rationalization of masonry is really important since masonry is the most widespread construction process in Brazil and it also interacts with various subsystems such as structural, hydraulic and electrical (Peña and Franco, 2006). The MWDP was introduced in the Brazilian market in 1980 and aims to optimize the compatibility of masonry with the various subsystems that interact with it, such as facilities and structures (Ferreira and Santos, 2008). Despite these efforts, Sabatini (1989), in the late 1980s, indicated that the performance of construction still has very poor results regarding productivity and material waste. In the early 2000s can be seen a greater investment by the construction companies in masonry projects of rationalized sealing aiming to reducing costs of construction.
The concept of BIM has existed since the 1960s; however, it only became commercially available in the mid-1990s due to the absence of efficient computers (Ayres, 2009). The BIM platform is based on the parametrization of technologies which enables data management and planning through parametric objects, which means objects with rich semantics, applied to the phases of the lifecycle of a building (Succar, 2010). These tools allow the system to easily identify projects incompatibilities; extract automatics quantitatives and generate instantiations of 2D and 3D Models (Arayci et al., 2011). It should be noticed that the BIM software generally does not meet the specific needs of each designer, so most platforms allows its customization (Sacks et al., 2004). Thus, at international and national levels, the production of customized work of BIM platforms for design automation can be verified.
Internationally, a large production of research was accomplished from the partnership between North American companies of reinforced concrete and the universities: Georgia Institute (USA) and the Israel Institute of Technology (Israel). The partnership "Design and Engineering Software Platform”, developed in the period of 2001-2004, produced design automation methods like Building Object Behavior (BOB); Description notation and method and Georgia Tech Process to Product Modeling (GTPPM) (Lee et al., 2005).
The BOB method consists in a kind of abbreviatted writing to describe the behavior of parametric objects and their relationship towards other objects; and the GTPPM a method to translate one computer language to the behavior of these objects. Rafael Sacks, Charles Eastman and Chang Lee can be highlighted by their work in the project. Sacks and Eastman were responsible for developing the book BIM Hand Book, published in 2005, a document that presents itself as a guide for the implementation of BIM (Eastman et al., 2008). It can also be cited researches of Cavieres et al (2009), a researcher at the Georgia Institute, who applied the BOB method in the automation of masonry projects.
In Brazil, we have an emphasis on customization work of BIM software, but few studies stand out in design automation. Ayres (2009) and Miller (2011) (Checucci et al., 2011), and Romcy (2012) are among the studies developed independently and in different universities on the topic of automation modular construction systems, based on the parametric modeling, but without use or refer to the BOB method.
By analyzing studies already developed in Brazil, we can see some automation features of masonry design that can be optimized by the BOB method. Thus, this research aims to develop a diagram which serves as the basis for the automation of the rationalized masonry project at any BIM platform, aiming for greater computational efficiency processes. The focus of the automation is to generate automatic paging walls with window frames.
2. Literature Review
The automation of the implemented design to BIM platforms can be developed by various methods based on parametric modeling. In researches of Lee (2005) and Cavieres (2009) they studied the automation of parts of a concrete system using the BOB method and parametric modeling. Romcy (2012) and Monteiro (2011) generated rationalized automation masonry from shape grammar and parametric modeling.
Shape grammar has emerged as form generation system for painting and sculpture by rules composition and it belongs to design computing knowledge area. The term computing does not necessarily mean direct application in computer applications, but any type of information processing. However, many researchers are studying the applications development for the shape grammar automation and it is being used in generating system of architectural forms (Celani et al., 2007). Some important elements which produce shape grammar are: vocabulary of shapes, spatial relationships, rules and the initial form (Monteiro, 2011).
Current technologies of parametric modeling allow better linking between design and geometry of shape grammar (Cavieres, 2009). Parametric modeling is a computational representation of a virtual object constructed from attributes. The attributes can be fixed if they did not suffer modifications or variables when they are represented by parameters and rules, which allow automatic adjustment of objects according to user control and the change of context (Andrade and Ruschel, 2009). Therefore, it is understood that the objects have to be shaped not only by the geometrical shape, but as units of information containing specific semantic relationships within its domain (Sacks et al., 2003).
Parametric modeling is an ambiguous and complex method because the parametric object can be developed by many ways; the best one is that which generates the lowest processing data for the computer system. Its complexity is therefore the number and the scope of the parameters and restrictions which grow exponentially as more building components are considered. Parametric modeling also still requires an algorithmic and mathematical thinking process (or programming), even though it does not actually require the use of a programming language (Lee et al., 2005).
According to Sacks et al (2003) there are three possible automation routines for a parametric object. The first routine is to design parts and connections, which can be understood as the automatic generation of individual parts and their connections from the power parameters. After that, an automatic adjustment of the object is done when a its parameter is changed, such as changes of charge or size. The last routine is to generate a layout based on knowledge, when a building system may be generated automatically after being fed parameters.
The BOB method was developed within a partnership of researchers and North American companies of reinforced concrete. It started due to the need of uptade and feeding a library of parametric objects of reinforced concrete pieces collaboratively. The BOB can be understood as shorthand writing and a protocol for description of the settings and behavior of parametric objects in a reusable and sharable format (Lee et al., 2005). The forms of BOB method representation are technical drawings and two dimensional or three dimensional orthogonal perspectives, but their representations do not require precision in the early stages. Only relationships and behavior between system components are important to be captured and communicated clearly. The geometric precision is determined during the final modeling of the object. The considered behaviors are four primitive types: fix, rotate, transfer and remodel. Special relations with other components can be: aligned, equal spacing, horizontal and normal restriction (Cavieres, 2009).
3. Method
The current research uses the notation method and description BOB developed by Lee et al (2005), related to design science research. This methodology differs from conventional science; it does not figure out anything new, but it produces something new. It is a tool to solve problems found in real world, in which its theoretical contribution happens from its application. Among artifacts that can be produced there are: models, diagrams, plans, organizational structures, commercial products and design of information systems (Lukka, 2003).
The original method is developed in four stages. However, due to the absence of a programmer to support the work, we will make small changes in the final two stages. The first stage is clarification, which consists in defining the construction systems and automation purpose. The second stage is the design phase in which the parameters, restrictions and minimum system standards are identified. The third stage was supposed to be the implementation phase, where we should deploy the patterns within a plug-in, but we slightly changed it to be the validation phase. In this stage, we evaluate the behavior patterns of submitting them in different situations in script form within the platform ArchiCAD 18. The last step will be the implementation phase, where activity diagrams will be developed in UML. According to Booch et al (2000), activity diagrams do not need to be developed in programming language. Thus, the diagrams developed will serve as the basis for the generation of plug-in BIM applicable to any platform.
4. Results and Discussion
4.1. Clarification phase
The parametric object chosen to be automated was the building system of rationalized masonry of ½ mooring, which has as main components bricks blocks (ceramic or concrete) and mortar joints. Additional components such as channels blocks "U" serves as lintels and sills, which means they will serve as structural components of the rough rough openings. The function chosen was the full pagination of an isolated masonry with spans (see Figure 01), which falls within the automation level: generation layout based on knowledge.
Figure 1. Parametric object behavior. Source: Levi Teixeira, 2015.
4.2. Design phase
During this phase the constraints and parameters were analyzed and the behavior patterns identified. The method was introduced through the concept of "modeling top-down" Sacks (2003), which initially walls with no details were observed, assessing its geometric behavior and restrictions on other components such as lintels, sills and mooring between blocks.
4.2.1. Restrictions and parameters
The common parameter to all system components is the fact that every component should be multiples of the M module, which is common to all commercial components of ceramic or concrete. The M module which will be set 15 cm. In addition to this convergence of parameters there are some particularities: the spans can only be inserted into the walls and both objects can only suffer any dimensional remodeling in relation to height and length because the thickness is fixed (see Figure 02). Lintels and sills act as structural components of frames and spans and should be located above and below them respectively. The structural components have a fixed thickness and height and width should be left at least 30 cm longer than the span for each side (see Figure 03). It’s important to notice that there are different types of existing rough rough openings such as a door with only lintels and windows that have the two structural components.
Figure 2. Rough openings: parameters and restrictions. Source: Levi Teixeira, 2015.
Figure 3. Lintels and sills: parameters and restrictions. Source: Levi Teixeira, 2015.
In addition to rough openings, which are optional components, the walls are mainly formed of blocks and mortar joints. The length of the blocks must be positioned parallel to the floor and the adjacent blocks in the same row must be fitted by the thickness. The top course of blocks must be fitted on the lower half avoiding the simultaneous joints (see Figure 04). Between one block and another in the lateral and upper sides there are mortar joints of 1cm (see Figure 05).
Figure 4. Blocks: parameters and restrictions. Source: Levi Teixeira, 2015.
Figure 5. Details of the joints: parameters and restrictions. Source: Levi Teixeira, 2015.
The blocks that make up the walls have fixed dimensions which are multiples of the M module, equal thickness and heights and varying lengths. Therefore, there are three main types of blocks called 2M and mooring blocks 1M and 3M, which have the following modular dimensions in terms of length, thickness, height: 15x15x20cm, 30 x15x20cm and 45x15x20cm and actual sizes of: 14x14x19cm, 29x14x19cm and 44 x14x19cm due to the presence of horizontal and vertical joints. The channel type blocks have dimensions 1M and 2M and are used as lintels and sills (see Figure 06 and 07).
Figure 6. Main blocks: Parameters and restrictions. Source: Levi Teixeira, 2015.
Figure 7. Channels blocks: parameters and restrictions. Source: Levi Teixeira, 2015.
4.1.1. Identification of minimum standards
The building system behavior patterns are identified by association of the restrictions presented with the modular dimensions of the components of the building system and the lease of it. After analyzing previous studies we observed that there are two sets of standards to generate automatic paging walls frames. The first possibility was proposed by Monteiro (2011) and another one is proposed by this research. Two different paths were chosen for automation, so we have some variation patterns according to each of the selected paths.
By observing the behavior of a wall from its dimensions, the R1 patterns can be extracted when the length of it obeys the following formula: C = M x N + 1 M (see Figure 08), and R2 can be extracted when the length obeys the following formula C = MxN (see Figure 09). Both patterns were already predicted by Romcy (2012).
Figure 8. Wall R1. Source: Levi Teixeira, 2015.
Figure 9. Wall R2. Source: Levi Teixeira, 2015.
By observing the interface variables with a frame rough opening we can work with them as Monteiro (2011) did: by separating them in filling areas. However, unlike the insulated wall standards presented above, where the walls begin only with R1 in this scenario and then open and close with R1 or R2, as the variation of the angled wall depends on the location and length of it. Thus, we have the following situations by determining areas (see Figure 10):
If the area is A1, the laying can only start with R1 and end with R1 or R2;
If the area is A2, A3, A4 or A5, the laying can begin or end with R1 or R2;
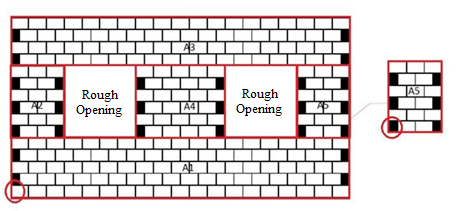
Figure 10. Experiment I. Source: Levi Teixeira, adapted form Monteiro (2011).
Another possible way to laying a wall is to fill the entire laying disregarding the presence of the frame as it was a single area of A1 type; and then remove or replace necessary blocks. From this premise we have new situations which are valid for any kind of rough opening:
Standard AB1: If there are blocks entirely within the rough opening, all of them will be eliminated;
Standard AB2: if there are 2M blocks partially within the rough opening, all of them will be replaced by 1M blocks;
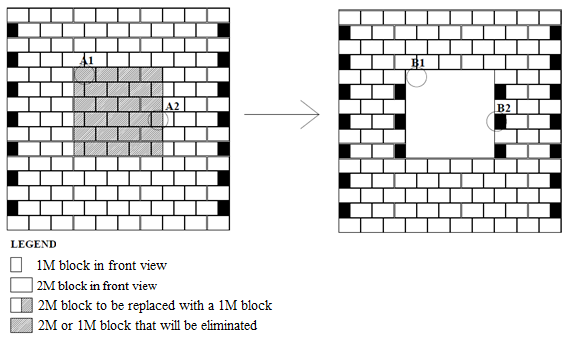
Figure 11. Experiment II. Source: Levi Teixeira, 2015.
The standard intended for the lintels and sills is the same to both experiments. These structural parts must be located respectively above and below the rough opening and in accordance that the laying opportunities may assume two different sizes (see Figure 12):
Standard CD1
- The size of the lintel shall follow the formula: rough opening + 30 cm if the block located at the end of the rough opening is entirely above it.
- The size of the sill shall follow the formula: rough opening + 30 cm if the block located at the end of the rough opening is entirely above it.
Standard CD2
- The size of the lintel shall follow the formula: rough opening + 45 cm if the block located at the end of the rough opening is partially above it.
- The size of the sill shall follow formula: rough opening + 45 cm if the block located at the end of the rough opening is partially above it.
Figure 12. Lintels and sills.
4.3. Validation phase
The standards were modeled and tested within the ArchiCAD 18 software at the script level during this stage, where different situations were simulated. The developed models have three dimensional and two dimensional representations. We decided to use only two dimensional representations, since they allow a more o clear visualization of the patterns behavior. Two or more tests were conducted on each presented pattern. The first test was the recognition of behavior, where we consider that when the same behavior is repeated on the second test the tendency is that it will be repeated over the other tests.
We submitted two automation paths to similar tests. The first test consists on filling a laying wall with the dimensions of 3m x 3m with a rough opening of modular size 1.05m x 1.20m and real size of 1.06m x 1.21m. In the second test we used the same wall with an increased value of a module (M) of 15cm to each side of the window and 20cm upward. The block height value was the same with the modular size of 1.35cm x1.40cm and real size of 1.36cm x 1.41cm. The increase of a module corresponds to the minimum change that may arise. In the event of unforeseen appearance of new standards, new tests will be done expanding more 15cm and always adjusting the real size with modular size (see Figure 13).
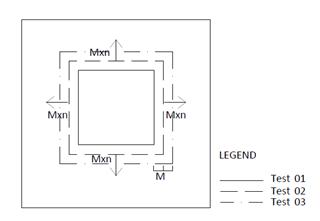
Figure 13. Tests 01, 02 and 03. Source: Levi Teixeira, 2015.
After the tests it was realized that the method I was fully contemplated. On the other hand, Method II partially met our expectations since we applied the replacement rule of blocks A2 for blocks B2 (replacement of a block 1M for a 2M) and the blocks located at the right of the rough opening were relocated in the wrong position (see Figure 14). This can be explained by the fact that all parametric objects in ArchiCAD platform have a reference point to be replaced or inserted. In order to solve the problem we would have to create two 1M blocks with distinct points of reference or move them after inserted. The first option was discarded because it was not possible to achieve it in ArchiCAD 18 software, so we opted for the algorithm that generates the shift even after inserted. At the end, it was suggested the subdivision standards in C2.1, C2.2 and we conducted new tests that proved the same.
Figure 14. Method II: Test 01. Source: LEVI TEIXEIRA, 2015.
The algorithm related to lintels and sills is common to both experiments and showed unexpected behavior where two patterns (CD1 and CD2) generated a single set of actions (see Figure 15).
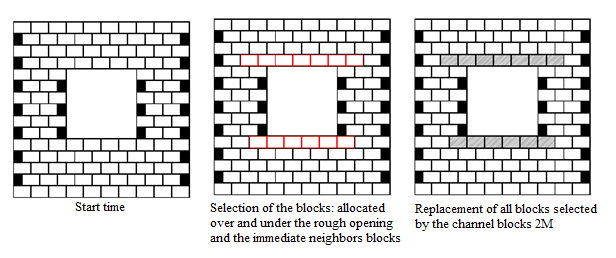
Figure 15. Lintels and sills simulation. Source: LEVI TEIXEIRA, 2015.
When the frames are placed in the corner of the wall, which is a more common situation to doors, we have the presence of blocks 1M and 2M, which have to be selected and replaced individually, thus generating a new standard.
4.4. Implementation
The activity diagrams were developed in three steps. First we searched for actions present in each method and their respective tests. Then the existing actions were compared in each test compared. Lastly, a single diagram was generated for each method at the end of the process. So, when we found similar actions we operate a continuous flow of actions and when action divergences were found we used a tool called bifurcation. In specific cases, where after the use of bifurcation it was necessary to unify the flow, we used a union bar (see Figure 16).
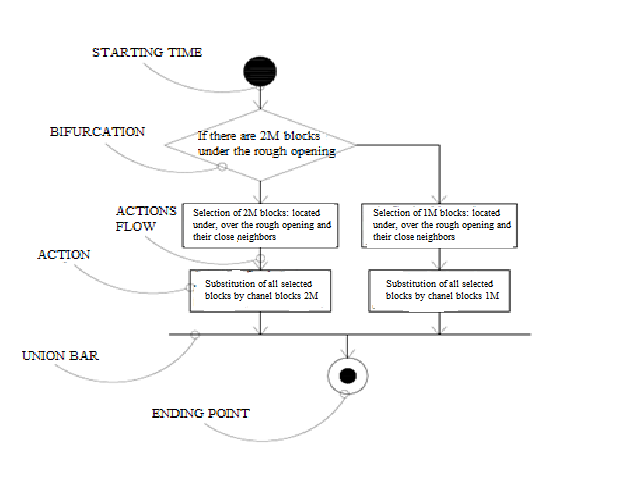
Figure 16. Diagram of lintels and sills.
After the development of both diagrams it can be seen that the path chosen by us generates a flow of much smaller actions compared to the one chosen by Monteiro (2011). However, Monteiro (2011) chosen path has the possibility of repeating the same algorithm, which depending on the number of frames on the wall may be repeated four to five times, which generates reducing flowchart actions, but it is always dependent on one an algorithms library and is still bigger than our flow (Annex 01 and Annex 02). Lintels and sills have only one action flow to two different visual patterns. However, we added more flow due to the possibility of 1M blocks substitutions, which has the same action set only by changing the type of block (see Figure 16). Another advantage offered by the new produced algorithm is that it can be applied in other situations, such as having a laying wall.
5. Conclusions
During the experiment some theories were proved true, such as the parametric modeling efficiency and its ambiguity and complexity. The scientific support design science showed itself necessary for adjustments to the BOB method used in the study.
Lee et al (2005) considers the parametric modeling as an ambiguous method because there are several possibilities to reach the same path and the best way is always the one with lowest data processing. The experiments showed the path developed by us as the best way because it has the lowest actions flow. The two visual patterns of lintels and sills, which were checked during design phase, have been translated into a single action flow at the implementation phase. This proves the ambiguity of this method and it also demonstrates that it not always generate different patterns generates different actions. The BOB method has proven far more effective in the sense of clarity and objectivity during the identification and validation of the behavior patterns of the masonry project components, especially when compared with other similar national studies using parametric modeling and shape grammar to develop their own methods.
The theory of design science helped us to solve all doubts regarding the BOB method, especially on how to validate the experiments without performing the programming and which artifacts we could generate. As the design science showed itself as a way of validating of the submission of the artifact in all possible contexts, we performed experiments with modular size variations. The artifact may be presented as a diagram. Regarding the scientific contributions, this study presents the development of a new path for laying walls that interface as rough opening and inserting the script in the simulation tool BOB method.
The insertion of the script simulation to the BOB method helped greatly to develop more accurate diagrams due to the absence of a programmer. We recommend that in future studies that have programmers on the team by still using the BOB method for key standards. It is also recommended the application of BIM diagrams developed on a platform by the use of a plug-in.
References
Addor, M., Castanho, M., Cambiaghi, H., Delatorre, J., Nardelli, S. and Oliveira, L., 2010. Colocando o “i” no BIM. Revista Acadêmica Arquitetura e Urbanismo, São Paulo, 4, pp.104-115.
Andrade, M. and Ruschel, R., 2009. Interoperabilidade entre ArchiCAD e Revit por meio do formato IFC. In: IV Encontro de Tecnologia de Informação e Comunicação na Construção Civil. Rio de Janeiro.
Arayici, Y., Coates, P., Koskela, L., Kagioglu, M. and Usher, C., 2011. Technology adoption in the BIM implementation for lean architectural practice. Automation in Construction, 20(2), pp.291-312.
Ayres, C., 2009. Acesso ao modelo integrado do edifício. Master. Universidade Federal do Paraná.
Booch, G., Rumbaugh, J. and Jacobson, I., 2000. UML–guia do usuário. Rio de Janeiro: Campus.
Cavieres, A., Gentry, R. and Al-Haddad, T., 2011. Knowledge-based parametric tools for concrete masonry walls: conceptual design and preliminary structural analysis. Automation in Construction, 20(6), pp.716-728.
Celani, G., Cypriano, D., Godoi, G. and Vaz, V., 2006. A gramática da forma como metodologia de análise e síntese em arquitetura. Conexão: comunicação e cultura, 5(10), pp.181-197.
Checcucci, S., Pereira, A.P.C. and Amorim, A.L., 2011. A difusão das tecnologias BIM por pesquisadores do Brasil. In: V TIC. Salvador, Brasil 4-5 August.
Dueñas Penã, M. and Franco, L., 2006. Método para elaboração de projetos para produção de vedações verticais em alvenaria. Gestão & Tecnologia de Projetos, 1(1), pp.126-153.
Eastman, C., Teicholz, P., Sacks, R. and Listan, K., 2008. BIM handbook: a guide to building information modeling for owners, managers, designers, engineers and contractors. Hoboken: Wiley.
Ferreira, R. and Santos, E., 2008. Uma proposta de uso do CAD 3D em projetos para produção de vedações verticais em edifícios. São Paulo: EPUSP. (Boletim Técnico da Escola Politécnica da USP).
Greven, H. and Baldauf, A., 2007. Introdução à coordenação modular da construção do Brasil: uma abordagem atualizada. Porto Alegre: ANTAC. (Coleção Habitare).
Lee, G., Sacks, R. and Eastman, M., 2005. Specifying parametric building object behavior (BOB) for a building information modeling system. Automation in Construction, 15(6), pp.758-776.
Lukka, K., 2003. The constructive research approach. In: L. Ojala and O-P Hilmola, ed. 2003. Case study research in logistics. Turku: Turku School of Economics and Business Administration, pp.83-101.
Monteiro, A., 2011. Projeto para produção de vedações verticais em alvenaria em uma ferramenta CAD-BIM. Master, Universidade Federal de São Paulo.
Müller, A., 2010. Informações para placas cerâmicas de revestimento segundo a abordagem BIM. Master. Universidade Estadual de Londrina.
Romcy, N., 2012. Proposta de tradução dos princípios da coordenação modular em parâmetros aplicáveis ao building information modeling. Master. Universidade Federal do Ceará.
Sacks, R., Eastman, M. and Lee, G., 2003. Parametric 3D modeling in building construction with examples from precast concrete. Automation in Construction, 13(3), pp.291-312.
Silva, M., 2003. Diretrizes para o projeto de alvenarias de vedação. Master. Universidade de São Paulo.
Succar, B., 2009. Building information modelling framework: a research and delivery foundation for industry stakeholders. Automation in Construction, 18(3), pp.357-375.